RSJ 複雑高精度機械の組立技術 研究専門委員会 (一般公開ページ)
|
|
|
|
|
|
|
狙い現在進行しているロボットを中心とした技術要素の開発や製造環境の改善に加え、高付加価値を生み出す複雑高精度機械のジョブショップ生産において、人を中心としたロボット技術を含む融合システムの実現手法を明らかにし、生産性を高めて日本のものづくり力を非連続的・飛躍的・継続的に向上させること、労働人口減少の課題解消等に役立つ新しい生産システムとしての有効性を立証すること、日本らしい現場熟練作業者との親和性のある「人の知恵を活かし進化し続けるものづくり」を実現することが狙いである。
|
|
|
概要ロボットと人間、人間と人間、ロボットとロボットの間で相互に干渉することによって結果としてより高い能力が発揮されることを示す。具体的には「自働化機械やロボット」と「人間」が、「時間的に同時」かつ「空間的に同一」の状態で、切り離せない合同作業(合わせ技)により、相補的に生産能力を増加させる新しい協業形態を「合業」と定義し、この実現を目指す。
|
|
|
|
活動体制委員長 : 大隅久(中央大学) 副委員長 : 相山康道(筑波大学)、 杉正夫(電気通信大学) 幹事 : 阿部聡(MSTC) メンバー : IHI、川崎重工業、東芝、 日立製作所、三菱電機、ファナック、AIST、ROBOCIP、NEDO、中央大学、大同大学、MSTC |
|
|
ご興味のある方はMSTCまで連絡をお願いいたします。 連絡先 電話:03-3500-4891 Email:info@mstc.or.jp 最終更新日:2025/3/3
|
||


![]()
合業とは?
|
合業、人間行動駆動、動作リテラシー
|
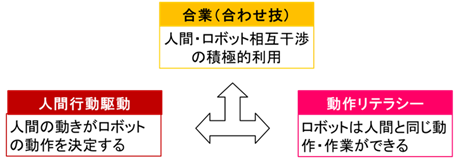
合業、人間行動駆動、動作リテラシー 上 : 「合業」とは、人とロボット間の、力や情報の相互干渉を用いる制御。 下左: 「人間行動駆動」は、ロボットが人の動作を観察して推定・予測し、人に従って動く。 要素技術としては、人の動作を分節化し、ワークの状態と人の動作の関係を認識し、それをもとに人と同期して動くということ。 下右: 「動作リテラシー」は、プログラム化された定型動作をさせるのではなく、人が体で覚えていて無意識に実行している動作を 再現する技術、人とともに動くために必要なもの。観察と力の干渉を通じて、「呼吸を合わせ」て動く、「水平に持つ」など。
ここで大事なことは、しばしば「ドラえもん」をつくるのは夢物語といわれるが、そうではなくあくまでも自動機械の進化系をつくる、いわゆる「自律」ですらなく、現在技術であるプログラムによる制御に、「人間行動駆動」や「動作リテラシー」という新たな要素を付加することで、一歩先に進むことができるのではないかということ。 |
|
合業の定義、「分業」と「合業」の違い
|
合業の定義、「分業」と「合業」の違い
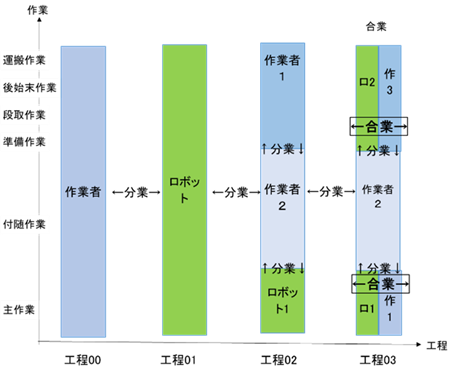
「自働化機械やロボット」と「人間」が、「時間的に同時」かつ「空間的に同一」の状態で、切り離せない合同作業(合わせ技)により、相補的に生産能力を増加させる新しい協業形態を「合業」と定義する。
縦軸:運搬、段取り、準備、主作業など作業の流れ。 横軸: 工程00と工程01は人とロボットで分業している例、組付けは人が行うが、溶接は機械がというように。 工程02は機械加工のような主作業と、部品の機械への人による据え付けのような付随作業を分担する例。逆もある。 工程03は人・ロボットが一緒に作業する例。
抽象的には、分業できない工程の人・ロボット協業(組み立て)、全自動化できない工程の人・ロボット協業(収穫作業)、二人作業の片方をロボットに置き換える協業(積み込み)、両手作業の片方をロボットに置き換える協業(ボルト・ナット締め)などいろいろな場合あるができていない。 |
|
難技の作業の特徴 |
難技の作業の特徴
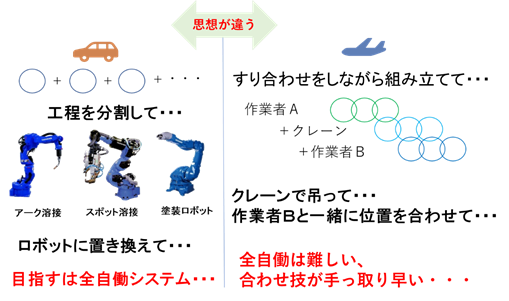
難技の作業の特徴の図では、左側は、ロボット化が進んでいる分野で、自動化率を上げることが目標。簡単な工程に分割して対応、自動車の溶接、電子部品の搬送など。 右は、難技。航空機など複雑高精度機械から、熟練技能者の暗黙知が必要な分野までいろいろあるが、摺り合わせが必要であったり、反復性が低かったり、ものの種類が多かったり、作業の変化が大きかったりする業務。プログラミングやティーチングに要する手間やコストが高すぎ、ティーチングやプログラムして作業を実行させるロボットではうまくいかない。 |
|
人と機械の作業における最適ポイント
|
人と機械の作業における最適ポイント
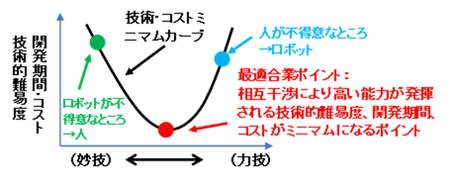
最適ポイントの図は、すべてを人、あるいはすべてを機械にするという方式ではなく、難技の処理には最適な組み合わせがあるはずということを述べている。
グラフの縦軸は、作業全体のコスト。 グラフの横軸は、作業の内容で、右に行くと、単純作業の正確な繰り返しなどの特性が強くなり、ロボットが得意ないわば「力技」。自動車車体の溶接なども含む。人はすぐに疲れてしまう。逆に左にいくと、繊細で変化に富む複雑な作業となり、いわば人が得意な「妙技」。各種の組み立てや野菜の収穫。ロボット化できるかもしれないが、プログラミングやティーチングに要する手間・時間が膨大で、コストがあわない。
人が得意といっても人だけにするとコストがかかるし、ロボットが得意といってもロボットだけにするとやはりコストがかかる。谷の部分では、それぞれの得意なことを組み合わせるとコストが最小化。現在の全自動化ではない体系が必要。突き詰めていくと合わせ技になる。 |
|
合業の位置づけ |
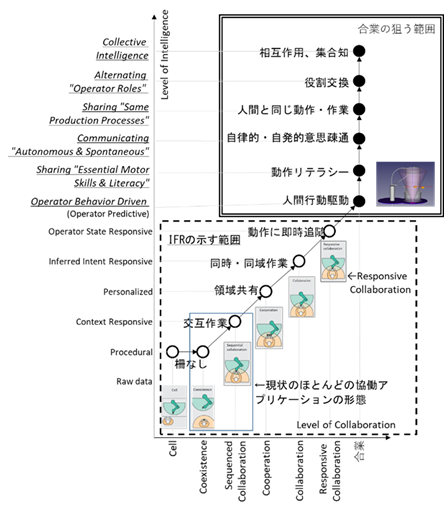
合業の位置づけ
下半分・太い点線で囲まれたところは国際ロボット連盟の資料。 いわゆる協働ロボットの現状と将来を示した図。現在の協働ロボットは、細線の枠内、左から二つ目と三つ目とされている。二つ目は人とロボットが柵無しの同じ空間にいても、ロボットがベルトコンベアーの上に並べた部品を人が手に取って作業するなど、同じ空間にいるだけの協業。その右は、ロボットが治具に部品を置き、ロボットがその場から離れている間に人が部品に手を加えるなど、交互に作業するだけ。これをさらに進めて、ロボットが人に直接モノを手渡すなど、作業領域を共有する「協働」、もっと進むとロボットと人が一つものを一緒にもって運ぶなど「同時・同域作業」。
一番右は人の動作に即時に追随する「即時追随協業」responsive collaboration。組立てたり、ボルトとナットを締めたりなど、領域を共有し同一物に同時に働きかける高度な「協業」。
上の二重線の枠の中にいくと、事前プログラミングではなく、学習などによって得られる「動作リテラシー」や「人間行動駆動」を組み込んだもので、この辺りを「合業」と呼んでいる。 |
|
「合業」を行うロボットと協働ロボットの違い
|
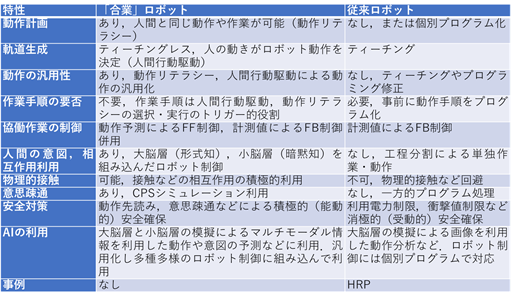
「合業」を行うロボットと協働ロボットの違い
現在のいわゆる「協働ロボット」との違いを要素ごとに示す、表左側特性の次の列が合業ロボット、その右が従来型の協働ロボット。
表頭直下の動作計画は、合業では、あらかじめ持っている「水平に持ち上げる」というような人の動き方をもとに人にあわせて動くのに対し、協働ロボットでは、プログラム化した定型化された動きしかできない。 軌道生成は、合業であれば、「水平に持ち上げる」動作と判断したら人が掴んだ場所の反対側をもって「水平に持ち上げる」軌道で動くのに対し、協働ロボットでは、個別にティーチングが必要という具合。 要するに、ティーチングレスで人に従って人のように複雑な動きをする。 技術的には、5行目にあるように、単なるFB制御ではなく、予測によるFF制御とあるべき状態からのズレを修正するFB制御を組み合わせ、6行目にあるように学習を通じて取得する「ゆっくり動き始める」とか「まっすぐ持つ」という暗黙知のようなものを活用する制御であることが、新たな要素。 7行目にあるように物理的接触を積極的に制御に利用するが、9行目にあるように、当たったら停止するという消極的安全策に限らず、動作を先読みして、当たらないように人と意思疎通するなど(これは人と同じ安全確保動作)、複雑な課題であるが、安全のために積極的に接触を利用することができるようになると考えられること。 |
![]()
活動
|
2025/10/10 |
研究専門委員会#64(メガ労働生産性システム研究会#111) |
|
|
|
|
2025/9/12 |
研究専門委員会#63(メガ労働生産性システム研究会#110) |
|
|
|
|
2025/8/8 |
研究専門委員会#62(メガ労働生産性システム研究会#109) |
|
|
|
|
2025/7/11 |
研究専門委員会#61(メガ労働生産性システム研究会#108) |
|
|
|
|
2025/6/13 |
研究専門委員会#60(メガ労働生産性システム研究会#107) |
|
|
|
|
2025/5/9 |
研究専門委員会#59(メガ労働生産性システム研究会#106) |
|
|
|
|
2025/4/11 |
研究専門委員会#58(メガ労働生産性システム研究会#105) |
|
|
|
|
2025/3/7 |
研究専門委員会#57(メガ労働生産性システム研究会#104) |
|
|
|
|
2025/2/7 |
研究専門委員会#56(メガ労働生産性システム研究会#103) |
|
|
1. NEDO 先導研究(2025)について |
|
2025/1/10 |
研究専門委員会#55(メガ労働生産性システム研究会#102) |
|
|
1.低イナーシャマニピュレーションについて 2.4階層モデルについて(indistinguishability) 3.RSJOS 2025 について 4.NEDO 先導研究(2025)について |
|
2024/12/6 |
研究専門委員会#54(メガ労働生産性システム研究会#101) |
|
|
1.動作リテラシーについて(ねじ締め、ケーシング組立) 2.生成AI について 3.NEDO 先導研究(2025)について |
|
2024/11/8 |
研究専門委員会#53(メガ労働生産性システム研究会#100) |
|
|
1.大隅・濱崎先生のワイヤ懸垂ロボット紹介 2.合業関連文献紹介 |
|
2024/10/11 |
研究専門委員会#52(メガ労働生産性システム研究会#99) |
|
|
1.大隅研究室の成果を応用したロボットによるボルト締結技術蓄積 2.NEDO RFI(2025) 3.SII2025 |
|
2024/9/30 |
研究専門委員会#51 (メガ労働生産性システム研究会#98) |
|
|
相山先生研究室訪問 |
|
2024/8/9 |
研究専門委員会#50 (メガ労働生産性システム研究会#97) |
|
|
中止 |
|
2024/7/12 |
研究専門委員会#49 (メガ労働生産性システム研究会#96) |
|
|
1.杉先生の研究及び研究室紹介 2.議論 |
|
2024/6/14 |
研究専門委員会#48 (メガ労働生産性システム研究会#95) |
|
|
1.RSJ第42回学術講演会オーガナイズドセッションについて 2.村上理論のペトリネット図 |
|
2024/5/10 |
研究専門委員会#47 (メガ労働生産性システム研究会#94) |
|
|
1.NEDO先導研究について 2.RSJ第42回学術講演会オーガナイズドセッションについて 3.合業関連の課題・問題(2024/5/9現在) |
|
2024/4/12 |
研究専門委員会#46 (メガ労働生産性システム研究会#93) |
|
|
1.NEDO先導研究について(ヒアリング報告) 2.RSJ第42回学術講演会オーガナイズドセッションについて(申し込み完了報告) 3.ワイヤ懸垂ロボットの適用分野について 4.鋳物仕上げ、鍛造などへの合業、ワイヤ懸垂ロボットの適用について |
|
2024/3/8 |
研究専門委員会#45 (メガ労働生産性システム研究会#92) |
|
|
1.NEDO先導研究 2.ワイヤ懸垂ロボットの適用分野について 3.RSJ第42回学術講演会オーガナイズドセッションについて |
|
2024/2/9 |
研究専門委員会#44 (メガ労働生産性システム研究会#91) |
|
|
1.NEDO 先導研究 |
|
2024/1/18 |
研究専門委員会#43 (メガ労働生産性システム研究会#90) |
|
|
1.SII2024報告 2.NEDO先導研究 3.ロボットアクションプラン関係 |
|
2023/12/15 |
研究専門委員会#42 (メガ労働生産性システム研究会#89) |
|
|
1.杉先生発表内容議論 2.SII2024情報 |
|
2023/11/20 |
」研究専門委員会#41 (メガ労働生産性システム研究会#88) |
|
|
1.IHI相山先生発表内容議論 2.SII2024情報 |
|
2023/10/13 |
研究専門委員会#41 (メガ労働生産性システム研究会#87) |
|
|
1.RSJ オーガナイズドセッション発表資料紹介 2.IHI 村上様発表内容議論 |
|
2023/9/15 |
研究専門委員会#40 (メガ労働生産性システム研究会#86) 第41 回日本ロボット学会学術講演会 オーガナイズドセッション OS16 人・ロボット協調による『合業』型生産システム |
|
|
オーガナイザー:大隅久( 中央大学)、村上弘記 ((株)IHI)、林浩一郎 株 ((株)IHI)、阿部聡 ((一財) 製造科学技術センター) 講演内容 第1部(3F1) 「合業」の位置づけと意義(阿部 聡) 生産プロセスにおける作業者とロボットの合わせ技「合業」による協働作業の方向性(村上 弘記) 隠れマルコフモデルを用いた手作業モニタリング技術の開発(砂川 拓哉 他 名) 自律・協調・階層型システムの最適制御に関する一検討(守屋 俊夫) 第2部(3F2) 人とロボットの協働環境のウェルビーイングを実現する協調安全/ システムの開発(福井秀利 他 名) 行動分析に基づいた安心停止スイッチの要件の提案(中坊 嘉宏 他 名) 操作者の目標位置姿勢推定に基づく遠隔組立作業の効率化(相山 康道 他 名) CNNを用いた音声データの会話の盛り上がりの評価(日置 遼大) |
|
2023/8/18 |
研究専門委員会#39 (メガ労働生産性システム研究会#85) |
|
|
1.RSJ オーガナイズドセッション調整 2.NEDO RFI 関係 3. F-REI 関係 |
|
2023/7/14 |
研究専門委員会#38 (メガ労働生産性システム研究会#84) |
|
|
1.RSJ オーガナイズドセッション調整 2.NEDO RFI 3.HPC ケーシング(Ver.2) |
|
2023/6/16 |
研究専門委員会#37 (メガ労働生産性システム研究会#83) |
|
|
1.大隅・濱崎先生ワイヤ懸垂ロボット等の研究内容紹介 2.4階層モデル検討 3.RSJ オーガナイズドセッション調整 |
|
2023/5/12 |
研究専門委員会#36 (メガ労働生産性システム研究会#82) |
|
|
1.2023 NEDO 先導研究 2.4階層モデル検討 3.ロボット分野における研究開発と社会実装の大局的なアクションプラン (NEDO 2023 年4 月24 日 (ロボットアクションプラン)) |
|
2023/4/14 |
研究専門委員会#35 (メガ労働生産性システム研究会#81) |
|
|
1.2023 NEDO先導研究 ヒアリング報告 2.SII2023 RSJ第41回日本ロボット学会学術講演会オーガナイズドセッション申込 3.4階層モデル検討 |
|
2023/3/10 |
研究専門委員会#34 (メガ労働生産性システム研究会#80) |
|
|
1.2023 NEDO先導研究 提案書(提出版) 2.SII2023 RSJ第41回日本ロボット学会学術講演会オーガナイズドセッション |
|
2023/2/10 |
研究専門委員会#33 (メガ労働生産性システム研究会#79) |
|
|
1.2023 NEDO先導研究 提案内容検討 2.SII2023 ワークショップ報告 |
|
2023/1/13 |
研究専門委員会#32 (メガ労働生産性システム研究会#78) |
|
|
1.2023 NEDO先導研究 提案内容検討について 2.SII2023 ワークショップへの参加について |
|
2022/12/9 |
研究専門委員会#31 (メガ労働生産性システム研究会#77) |
|
|
1.2023 NEDO先導研究 提案内容検討について 2. SII2022 ワークショップへの参加について |
|
2022/11/16 |
研究専門委員会#30 (メガ労働生産性システム研究会#76) |
|
|
都合により中止 |
|
2022/10/14 |
研究専門委員会#29 (メガ労働生産性システム研究会#75) |
|
|
1.RSJ研究専門委員会ホームページについて 2.SII2022 ワークショップへの参加について 2022 IEEE/SICE International Symposium on System Integration(SII2022) Workshop on Dependable Safety System - ANSHIN & Safety for Robots & Intelligent Systems - 3.Gogyo 英文説明について 4.第7期活動計画について |
|
2022/9/16 |
研究専門委員会#28 (メガ労働生産性システム研究会#74) |
|
|
1.RSJオーガナイズドセッション 質疑メモについて 2.研究専門委員会ホームページについて 3.SII2022 ワークショップへの参加について 2022 IEEE/SICE International Symposium on System Integration(SII2022) Workshop on Dependable Safety System - ANSHIN & Safety for Robots & Intelligent Systems |
|
2022/9/7 |
第40回日本ロボット学会学術講演会(RSJ2022) オーガナイズドセッション OS13「人・ロボット協調による『合業』型生産システム」 |
|
|
オーガナイザー:大隅 久(中央大学),林 浩一郎((株)IHI)、阿部 聡(MSTC) |
|
2022/8/12 |
研究専門委員会#27 (メガ労働生産性システム研究会#73) |
|
|
1.RSJオーガナイズドセッションについて 2.SIGVerse合業モデル (ROS/GAZEBOによる試行) |
|
2022/7/12 |
研究専門委員会#26 (メガ労働生産性システム研究会#72) |
|
|
1.RSJオーガナイズドセッションについて 2.SIGVerse合業モデル 3.ペトリネット図 4.NEDO 先導研究 2023 RFI |
|
2022/6/10 |
研究専門委員会#25 (メガ労働生産性システム研究会#71) |
|
|
1.RSJオーガナイズドセッションについて 2.JST提案書 (1)未来社会創造事業(探索加速型) 「次世代情報社会の実現」領域 (運営統括:前田 英作) AI・ビッグデータ・ IoT を駆使したHuman centric デジタルツインによる新たな未来社会デザイン テーマ:人と力や意図の相互作用を伴うロボット制御 (2) 社会技術研究開発事業 科学技術の倫理的・法制度的・社会的課題 (ELSI)への包括的実践 研究開発プログラム テーマ:人間とロボットの意思疎通による能動的・積極的な安全安心技術 3.ペトリネット図 |
|
2022/5/13 |
研究専門委員会#24 (メガ労働生産性システム研究会#70) |
|
|
1.「合業」の4階層モデル実現のために技術シーズについて |
|
2022/4/15 |
研究専門委員会#23 (メガ労働生産性システム研究会#69) |
|
|
1.NEDO先導研究提案、シス協戦略策定事業成果報告 2.RSJ 第40回学術講演会参加について オープンフォーラム/オーガナイズドセッション 3.合業階層モデルについて (自由エネルギー原理/予測符号化/能動的推論) |
|
2022/3/11 |
研究専門委員会#22 (メガ労働生産性システム研究会#68) |
|
|
合業に関する以下の提案書と報告書について報告する。 NEDO先導研究提案書 2022/2/16 提出済、2022/3/22 ヒアリング予定 シス協戦略策定事業成果報告書 2022/3/8 提出済、MSSF内容確認中 |
|
2022/2/4 |
研究専門委員会#21(メガ労働生産性システム研究会#67) |
|
|
合業 ・NEDO先導研究 技術開発項目について ・シス協戦略策定事業 成果報告書について |
|
2022/1/14 |
研究専門委員会#20(メガ労働生産性システム研究会#66) |
|
|
合業 ・状態遷移図 ・技術開発項目について(シス協戦略策定事業纏めおよび NEDO先導研究応募に向け) |
|
2021/12/10 |
研究専門委員会#19(メガ労働生産性システム研究会#65) |
|
|
「合業」の状態遷移図(案)について議論 |
|
2021/11/12 |
研究専門委員会#18(メガ労働生産性システム研究会#64) |
|
|
「合業」のシステム図(案)について議論 |
|
2021/10/8 |
研究専門委員会#17(メガ労働生産性システム研究会#63) |
|
|
・MSSF第3回戦略策定委員会資料説明(シーズ調査進捗等) ・合業ハードウェアイメージについて ・メガ労働生産性システム研究会第6期活動について |
|
2021/9/10 |
研究専門委員会#16(メガ労働生産性システム研究会#62) |
|
|
・合業、人間行動駆動、動作リテラシー実現のためのシステム図、 ・(シーズ調査) |
|
2021/9/8 |
第39回日本ロボット学会学術講演会 オープンフォーラム 合業 ‐ ロボットと人間が助け合う未来の生産システムを目指して (第二回) |
|
|
杉正夫(電気通信大学)、大隅久(中央大学)、林浩一郎(IHI)、川平(MSTC)、村上弘記(日本ロボット学会)、平井成興(NEDO)、阿部、川平、牛丸、堀江(MSTC) |
|
2021/8/20 |
研究専門委員会#15(メガ労働生産性システム研究会#61) |
|
|
合業、人間行動駆動、動作リテラシー実現のための共通アルゴリズム、シーズ等について議論 |
|
2021/7/9 |
研究専門委員会#14(メガ労働生産性システム研究会#60) |
|
|
「合業」シナリオ 仮テーマ:息を合わせて物を運ぶ(メガ資料#60-5)について議論する。 |
|
2021/6/11 |
研究専門委員会#13(メガ労働生産性システム研究会#59) |
|
|
3.人間行動駆動、干渉の要素、動作リテラシーの関係について議論する。 |
|
2021/5/14 |
研究専門委員会#12(メガ労働生産性システム研究会#58) |
|
|
3.合業の分類について議論する。 |
|
2021/4/9 |
研究専門委員会#11(メガ労働生産性システム研究会#57) |
|
|
以下の資料に基づいて合業の具体的な事例について検討する。 3.合業の事例検討(両手、複数人作業) 4.ぶどうの袋掛け 5.軽トラ積み込み |
|
2021/3/12 |
研究専門委員会#10(メガ労働生産性システム研究会#56) |
|
|
3.文献紹介 (資料#56-5A~5H) 適宜おこなう。 4.人間行動駆動+動作リテラシーの構成議論(資料#56-5, 5A~5H) |
|
2021/2/12 |
研究専門委員会#9(メガ労働生産性システム研究会#55) |
|
|
3.文献紹介 (資料#55-5A~5K) 適宜おこなう。 4.人間行動駆動+動作リテラシーの構成議論(資料#55-5, 5A~5J) |
|
2021/1/22 |
研究専門委員会#8(メガ労働生産性システム研究会#54) |
|
|
3.文献紹介 (資料#54-5A~5J) 適宜おこなう。 4.人間行動駆動+動作リテラシーの構成議論(資料#54-5, 5A~5J) |
|
2020/12/11 |
研究専門委員会#7(メガ労働生産性システム研究会#53) |
|
|
3.文献紹介 (資料#53-8,8A,9,9A,9B) 4.産業用ロボットとの協働の形態議論 (資料#53-5、6) 5.人間行動駆動+動作リテラシーの構成議論(資料#53-7、8、8A) 6.RSJ運営費利用 |
|
2020/11/20 |
研究専門委員会#6(メガ労働生産性システム研究会#52) |
|
|
3.合業の位置づけ議論(IFR図追記検討) (資料#52-5) 4.人間行動駆動と動作リテラシー議論(資料#52-6) |
|
2020/10/16 |
研究専門委員会#5(メガ労働生産性システム研究会#51) |
|
|
3.ロボット学会研究専門委員会向け活動内容紹介資料 (資料#51-5、9、10、11) 4.「人間行動駆動」、「動作リテラシー」、「ボルトナット締め付け」議論内容図示 (資料#51-6) 5.メガ労働生産性システム研究会(第5期計画) (資料#51-7) 6.機械システム振興協会提案 (資料#51-8) 7.動作リテラシー検討 (資料#51-12、13) 参考文献 資料#51-9 Demystifying Collaborative Industrial Robots 資料#51-12 技能競技大会を活用した人材育成の取組マニュアル (精密機器組立て職種編) |
|
2020/9/11 |
研究専門委員会#4(メガ労働生産性システム研究会#50) |
|
|
3.参考文献紹介 Architecture for Safe Human-Robot Collaboration: Multi-Modal Communication in Virtual Reality for Efficient Task Execution (資料50-9) 4.ロボット学会研究専門委員会向け活動内容紹介資料 (資料50-5、7) 5.合業の研究開発事項について (資料50-6) 「人間行動駆動」、「動作リテラシー」、「ボルトナット締め付け」実現のシナリオとしてはどのようなものがあるか議論。 |
|
2020/8/21 |
研究専門委員会#3(メガ労働生産性システム研究会#49) |
|
|
3.参考文献紹介 Human-Robot Collaboration Task sharing through Virtual Reality(資料48-9) 4.ロボット学会研究専門委員会向け活動内容紹介資料 (資料48-5、8) 5.合業の研究開発事項について (資料48-6) 「人間行動駆動」、「動作リテラシー」、「ボルトナット締め付け」実現のシナリオとしてはどのようなものがあるか議論。 6.複雑高精度機械の組立技術のための3Dモデル (資料48-7) 高圧圧縮機モジュール3Dモデルについて議論 7.活動概要、NEDO 2021 先導研究RFI、産機課/ファナック説明資料 |
|
2020/7/10 |
研究専門委員会#2(メガ労働生産性システム研究会#48) |
|
|
3.参考文献紹介 時計の組立(資料48-8、9、10、11) 4.ロボット学会研究専門委員会向け活動内容紹介資料 (資料48-5) 5.合業の研究開発事項について (資料48-6) 「人間行動駆動」、「動作リテラシー」、「ボルトナット締め付け」実現のシナリオとしてはどのようなものがあるか議論。 6.複雑高精度機械の組立技術のための3Dモデル (資料48-7) 高圧圧縮機モジュール3Dモデルについて議論 |
|
2020/6/12 |
研究専門委員会#1(メガ労働生産性システム研究会#47) |
|
|
3.ロボット学会研究専門委員会向け活動内容紹介資料 (資料47-7) 4.合業の研究開発事項について (資料47-5、6) 「人間行動駆動」、「動作リテラシー」、「ボルトナット締め付け」実現のシナリオとしてはどのようなものがあるか議論。 5.複雑高精度機械の組立技術のための3Dモデル (資料47-8) 高圧圧縮機モジュール3Dプリンティング製作可否について議論 |
|
2020/5/15 |
メガ労働生産性システム研究会#46 |
|
|
3.ロボット学会研究専門委員会向け活動内容紹介資料 (資料46-6) ロボット学会での活動紹介用の資料ドラフトについてのコメントを送付する 4.文献紹介 詳細画像識別(FGVC)によるボルトナットの識別の紹介 (資料46-7) 5.複雑高精度機械の組立技術のための3Dモデル (資料46-8) 高圧圧縮機モジュール3Dプリンティング製作可否について議論 6.合業の研究開発事項について (資料46-5) 「人間行動駆動」、「動作リテラシー」、「ボルトナット締め付け」実現のシナリオとしてはどのようなものがあるか議論。各自シナリオ(案)を考える。 宿題: (1)ロボット学会での活動紹介用の資料ドラフトについてのコメント (2)「人間行動駆動」、「動作リテラシー」、「ボルトナット締め付け」実現のシナリオ 希望回答期限:5/25 |
|
2020/4/10 |
メガ労働生産性システム研究会#45 コロナのため開催中止 |
|
2021/3/13 |
メガ労働生産性システム研究会#44 |
|
|
3.合業ロボットイメージおよび研究開発事項 4. 自由討論 |
|
2021/2/25 |
メガ労働生産性システム研究会#43 |
|
|
3.合業ロボットイメージおよび研究開発事項 4. 自由討論 |
|
2020/1/10 |
メガ労働生産性システム研究会#42 |
|
|
3.合業ロボットイメージおよび研究開発事項 4.先導研究の枠がないことへの対応 5.自由討論 |
|
2019/12/13 |
メガ労働生産性システム研究会#41 |
|
|
3.合業ロボットイメージおよび研究開発事項 4.自由討論 |
|
2019/11/19 |
メガ労働生産性システム研究会#40 |
|
|
3.合業ロボットイメージおよび研究開発事項 4.自由討論 |
|
2019/10/4 |
メガ労働生産性システム研究会#39 |
|
|
3.第3期まとめと第4期活動計画 4.合業ゴールイメージ 5.合業の概念、定義、シナリオ、アイデア 6.3Dプリンティングによる模擬部品製作(HPC模擬ケーシング) 7.自由討論 |
|
2019/9/6 |
メガ労働生産性システム研究会#38 |
|
|
3.NEDO2020先導研究RFIについて 4.ロボット学会オープンフォーラム参加について 5.第4期活動について 6. 第3期製作の合業モデルについて 7.自由討論 8. 今後の予定 |
|
2019/9/3 |
第37回日本ロボット学会学術講演会 オープンフォーラム 合業 ‐ ロボットと人間が助け合う未来の生産システムを目指して |
|
|
発表者 大隅久(中央大学)、平井成興(NEDO)、宮澤和男(MSTC)、堀江和男(MSTC、事務局) |
|
2019/8/9 |
メガ労働生産性システム研究会#37 |
|
|
3.H31先導研究結果 4.ロボット学会オープンフォーラム 5.NEDO R2 先導研究 RFI 6. 第3期製作の合業モデルについて 7.自由討論 8. 今後の予定 |
|
2019/7/5 |
メガ労働生産性システム研究会#36 |
|
|
3.事例紹介 スマートグラスGE 現場 (Jet Engine) 飛行機 機体組立における合業 テンセグリティ構造 4.合業試験手法 Rev.A 5.合業の英語表記 Rev.A 6.合業システムイメージ、超人イメージ 7.自由討論 8. 今後の予定 |
|
2019/6/7 |
メガ労働生産性システム研究会#35 |
|
|
3. 第35回日本ロボット学会学術講演会 オープンフォーラム参加 4.ものづくり×AIに関する調査事業の希望 5.合業試験手法 6. 合業の英語表記 7.データ駆動制御手法 8.自由討論 9. 今後の予定 |
|
2019/5/10 |
メガ労働生産性システム研究会#34 |
|
|
3.先導研究提案書および今後の予定について 4.概念図、ポンチ絵検討 5. 自由討論 6. 今後の予定 |
|
2019/4/5 |
メガ労働生産性システム研究会#33 |
|
|
3.先導研究応募内容について 4. 自由討論 5. 今後の予定 |
|
2019/3/8 |
メガ労働生産性システム研究会#32 |
|
|
3.ロボット、超人、合業の仕様、イメージについて 4. 自由討論 5. 今後の予定 |
|
2019/2/8 |
メガ労働生産性システム研究会#31 |
|
|
3.ロボット、超人、合業の仕様について 4. 自由討論 5. 今後の予定 |
|
2019/1/11 |
メガ労働生産性システム研究会#30 |
|
|
3.ロボット、超人、合業の仕様について 4. 自由討論 5. 今後の予定 |
|
2018/12/7 |
メガ労働生産性システム研究会#29 |
|
|
3.NEDO新新プログラム情報提供書RFI(H31)提出について 4.ロボット、超人、合業の仕様について 5.自由討論 6.今後の予定 |
|
2018/11/9 |
メガ労働生産性システム研究会#28 |
|
|
3.第3期の活動について 4.平板テストピース 5.HPC模擬ケーシング 6.現行の協働ロボット 7.新しいロボットの事例 8.活動大日程 9.自由討論 10.今後の予定 |
|
2018/10/5 |
メガ労働生産性システム研究会#27 |
|
|
2.メガ労働生産性システム提案書について 3.第3期の活動について 4.活動大日程 5.自由討論 6.今後の予定 |
|
2018/9/7 |
メガ労働生産性システム研究会#26 |
|
|
2.メガ労働生産性システム提案書について 3.活動大日程 4.自由討論 5.今後の予定 |
|
2018/8/9 |
メガ労働生産性システム研究会#25 |
|
|
2.メガ労働生産性システム提案書について 3.活動大日程 4.自由討論 5.今後の予定 |
|
2018/7/6 |
|
|
|
2.メガ労働生産性システム提案書について 3.活動大日程 4.自由討論 5.今後の予定 |
|
2018/6/1 |
|
|
|
2.メガ労働生産性システム提案書について 3. 活動大日程 4. 今後の予定 |
|
2018/5/11 |
|
|
|
2.メガ労働生産性システム提案書について 3. 活動大日程 4. 今後の予定 |
|
2018/4/6 |
|
|
|
2.エレガンスマシンで実現できるイメージについて 3. 活動大日程 4. 今後の予定 |
|
2018/3/16 |
|
|
|
2.エレガンスマシンで実現できるイメージについて 3. 活動大日程 4. 今後の予定 |
|
2018/2/23 |
|
|
|
2.研究開発項目(案)について 3. 活動大日程 4. 今後の予定 |
|
2018/1/11 |
|
|
|
2.人間の能力増強 3.メガ労働生産性システム実現のための議論の焦点 4.メガ労働生産性プロジェクトイメージ 5.活動大日程 6.今後の予定 |
|
2017/12/8 |
|
|
|
2.メガ労働生産性システム実現のためのロードマップ 3.シーズ調査と連携候補 4.第1期活動報告および活動報告会の開催 5.活動大日程 6.今後の予定 |
|
2017/11/8 |
|
|
|
2. メガ労働生産性システム実現のためのロードマップについて 3. シーズ調査と連携候補 4.活動大日程 4.今後の予定 |
|
2017/10/17 |
|
|
|
2.第1期活動報告書について 3.メガ労働生産性システム実現のためのロードマップについて 4.活動大日程 4.今後の予定 |
|
2017/9/15 |
|
|
|
2.メガ労働生産性システム実現のためのロードマップについて 3.活動大日程 (第2期活動提案) 4.今後の予定 |
|
2017/8/24 |
|
|
|
2.メガ労働生産性システム実現のためのロードマップについて 3.活動大日程 4.今後の予定 |
|
2017/7/14 |
|
|
|
2.IHI見学所感 3.メガ労働生産性システム実現イメージについて 4.活動大日程 5.今後の予定 |
|
2017/6/23 |
|
|
|
(株)IHI 瑞穂工場見学 |
|
2017/5/19 |
|
|
|
2.メガ労働生産性システム実現イメージについて 3.活動大日程 4.今後の予定 |
|
2017/4/21 |
|
|
|
2.今後の研究会の進め方について 3.活動大日程 4.今後の予定 |
|
2017/3/17 |
|
|
|
2.NEDOエネルギー環境新技術先導プログラムヒアリングについて 3.活動大日程 4.今後の予定 |
|
2017/2/24 |
メガ労働生産性システム研究会#7
|
|
|
2.NEDOエネルギー・環境新技術先導プログラム応募について 3.活動大日程 4.今後の予定 |
|
2017/1/20 |
|
|
|
3.NEDOエネルギー・環境新技術先導プログラム応募について 4.活動大日程 5.今後の予定 |
|
2016/12/20 |
|
|
|
3.各社の作業、技術課題のA,B,Cレベル分け 4.作業者イメージ 5.活動大日程 6.今後の予定 |
|
2016/11/21 |
|
|
|
3.各社の技術課題について (2016/11/18見直し) *宿題回答 *自動化、ロボット化したい作業 *どんなロボットが欲しいか? *新しい作業者のイメージは? 4. NEDO:H29先導研究 / RFI 提出 5.活動大日程 6.今後の予定 |
|
2016/10/19 |
|
|
|
3.各社の技術課題について 4. NEDO:H29先導研究 / RFI再応募について 5.活動大日程 6.今後の予定 |
|
2016/9/14 |
|
|
|
3.リーダ候補検討 4.自由討論 5.活動大日程 6.今後の予定 |
|
2016/8/24 |
|
|
|
3.メンバー自己紹介 4.活動大日程 5.自由討論 6.今後の予定 |
|
2016/7/14 |
|
|
|
(1)「X づくり研究会」の概要 (2)「X づくり研究会」のうち、“各論/テーマ活動型” の概要 |